The Compute is Here. Now, What About the Data? Why Data Was the Biggest Gap Discussed at NVIDIA GTC 2026 for Robotics
The Compute is Here. Now, What About the Data? Why Data Was the Biggest Gap Discussed at NVIDIA GTC 2026 for Robotics
If you watched Jensen Huang take the stage at the SAP Center for NVIDIA GTC 2026, the vision was clear: we have officially entered the era of Physical AI. Between the launch of the Vera Rubin architecture, the new Cosmos world models, and the evolution of the Isaac GR00T foundation models for humanoids, the compute and software frameworks required to build general-purpose robots are finally here.
But if you walked the floor and talked to the engineers actually building these machines, a massive, glaring bottleneck dominated the conversation. It wasn’t about inference speeds or liquid cooling. The biggest gap in robotics right now is the data.
Generalist robots need to understand physics, spatial awareness, and complex manipulation. But unlike LLMs, you can’t just scrape the internet to teach a robotic arm how to fold laundry or assemble a motor. Here is why the robotics data gap was the most critical hurdle discussed at GTC 2026, and how the industry has to fix it.
1. Internet Data Gives You Reasoning, Not Control
We’ve proven that feeding massive amounts of internet text and video into models gives them a baseline level of "common sense." But as discussed heavily during the Isaac GR00T sessions, watching a 2D YouTube video of a human picking up a cup does not teach a robot how much pressure to apply to a plastic cup versus a glass one.
Robots require egocentric data—a first-person perspective combined with physical action. They need to learn from the exact viewpoint of their own sensors, mapping intent to physical kinematics. That type of data doesn't exist on the web; it has to be created from scratch.
2. Simulation is Only as Good as the Reality You Feed It
NVIDIA made massive waves announcing the Open Physical AI Data Factory Blueprint, leaning heavily on tools like Cosmos and Omniverse to generate synthetic data. The idea is that you take a small amount of real-world data and multiply it exponentially in simulation to cover edge cases.
But there is a catch: to generate accurate synthetic data, you need pristine, high-fidelity human demonstrations as the baseline. If your foundational real-world data is messy, poorly synced, or lacks dexterous nuance, your simulated data will just scale up those errors. You cannot bypass the need for real-world, human-in-the-loop training.
3. The Teleop and Sensor Sync Nightmare
This is where robotics teams are currently hitting a wall. To get that baseline data, companies are forced to build their own teleoperations setups. But capturing human demonstrations is a logistical nightmare.
AI engineers are spending 80% of their time acting as data janitors. They are trying to manually stitch together messy RGB camera feeds, depth sensors, and tactile inputs. By the time they finally get a dataset perfectly timestamped and synced, weeks have passed.
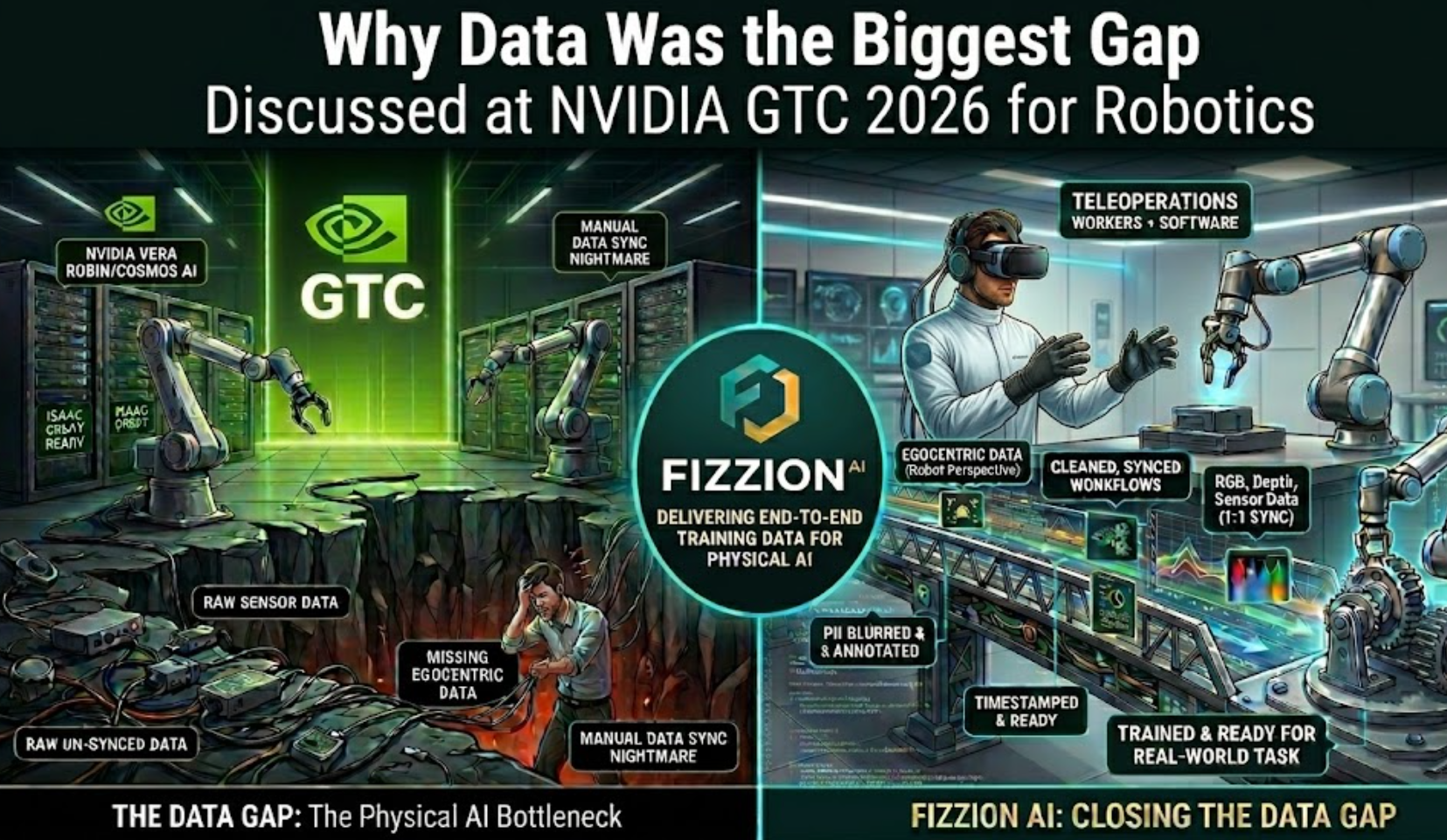
How Fizzion AI Closes the Gap
This is exactly the bottleneck Fizzion AI is stepping in to shatter. Instead of forcing robotics companies to build custom hardware rigs, hire human operators, and write custom scripts to sync sensor data, Fizzion AI provides an end-to-end training data solution built explicitly for Physical AI.
They deliver the critical fuel that models like Isaac GR00T need:
- Egocentric Data: Capturing the high-fidelity, first-person action data robots actually need to learn spatial awareness and manipulation.
Teleoperations Workers + Software: Fizzion provides the human-in-the-loop infrastructure—both the software platform and the skilled operators—to generate accurate demonstration data at scale.
Cleaned, "Ready-to-Go" Data: No more data janitor work. Fizzion delivers datasets where RGB, Depth, and Sensor data are perfectly synced, timestamped, and immediately ready to feed into a training pipeline.
Enterprise-Grade Compliance: Fully annotated datasets with strict PII protection (like auto-blurring faces and sensitive information), ensuring data is secure and compliant from day one.
The Takeaway
GTC 2026 proved that the chip wars for robotics are stabilizing. The hardware to run intelligent machines is here, and the simulation environments are breathtaking. But the companies that will actually get humanoid and autonomous robots out of the lab and into the real world are the ones who solve their data pipelines today.
If your engineers are spending more time cleaning sensor data than training models, your robotics strategy is already falling behind. It’s time to plug into data built for reality.
Reach out to us for a quote!
Did you enjoy this article?