Not All Robots Should Look Like Us. But All Robots Should.......

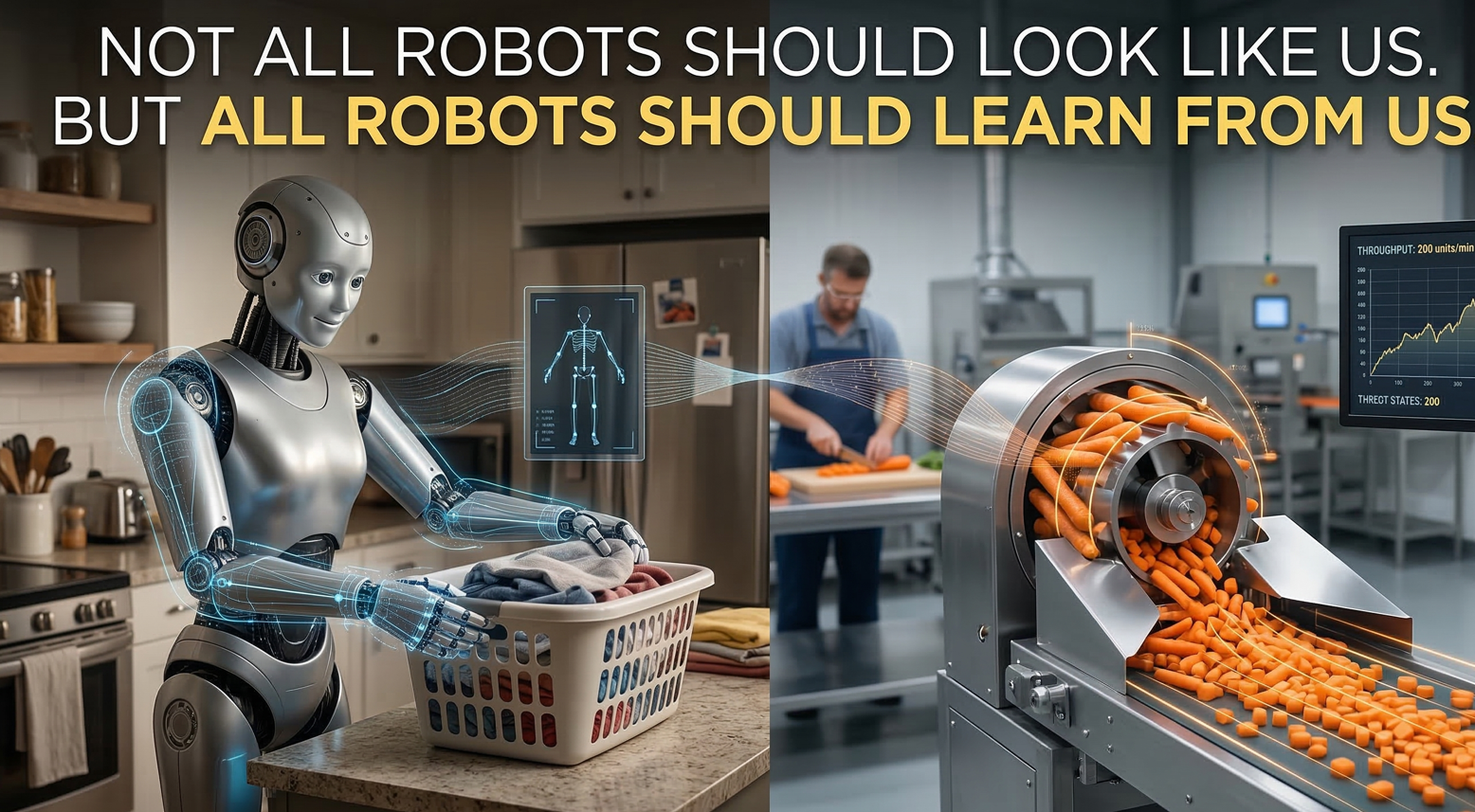
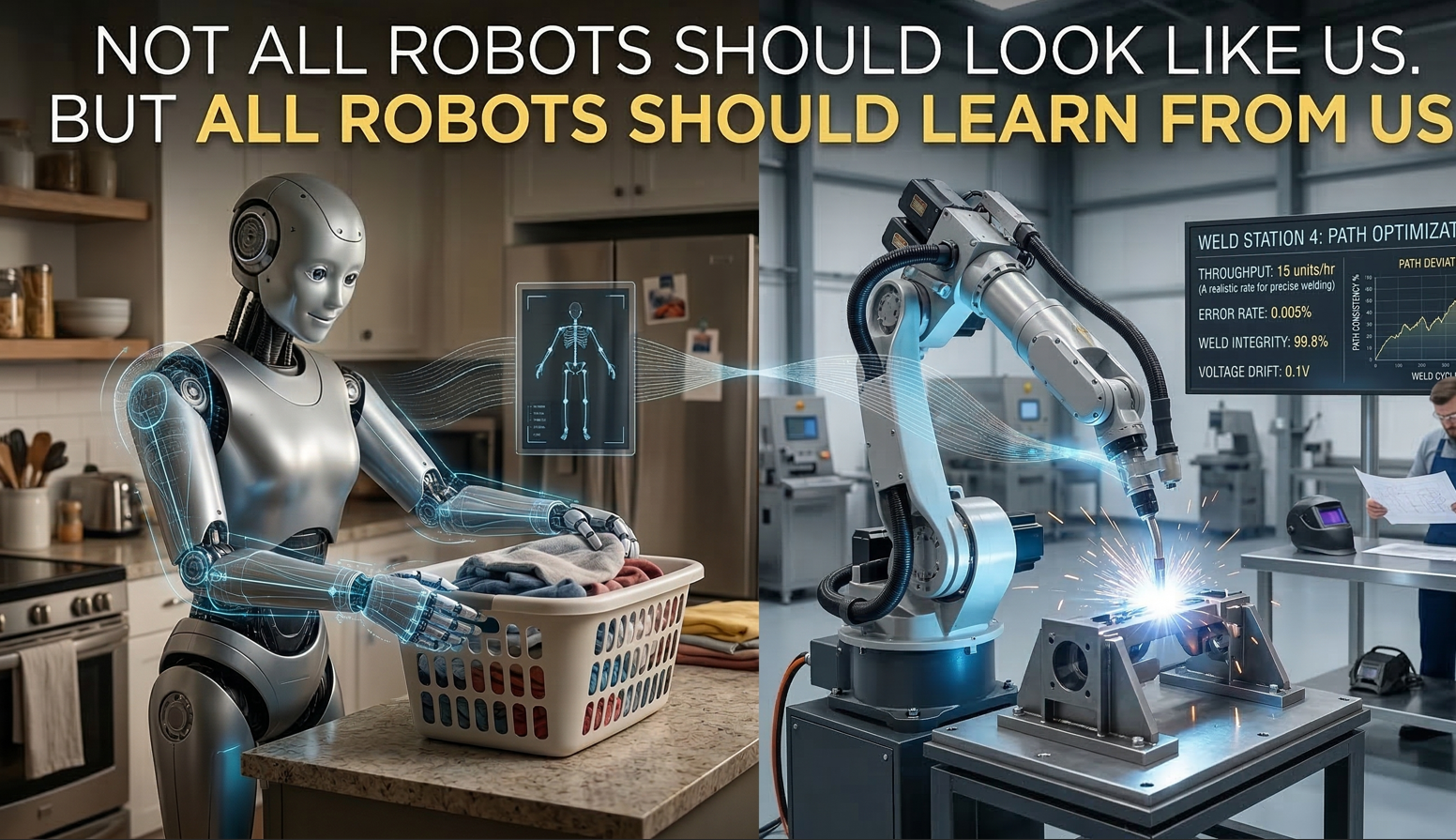
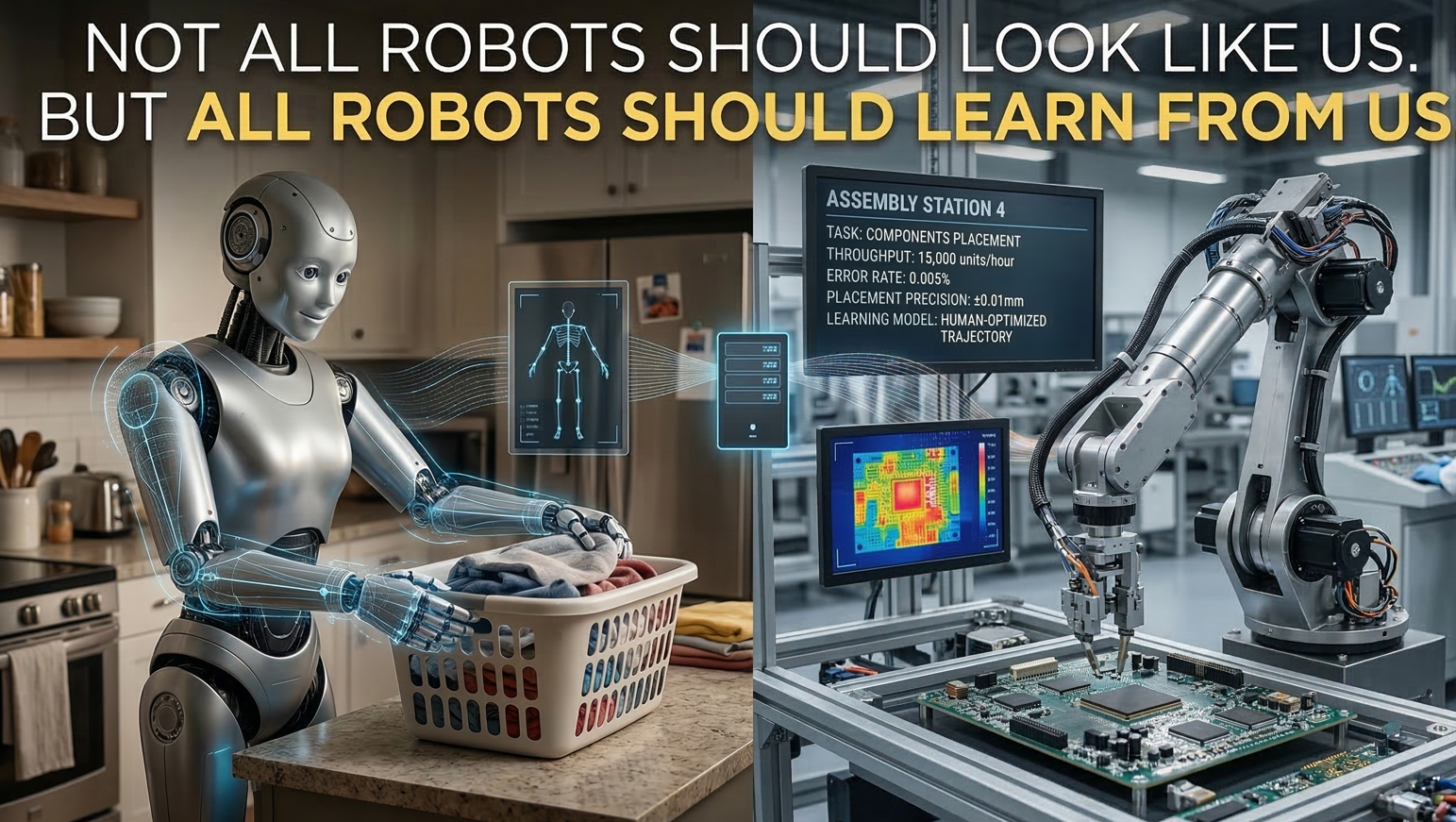
Not All Robots Should Look Like Us.
But All Robots Should Learn From Us.
There’s a quiet assumption in automation:
If robots are going to replace human tasks…they should look and move like humans.
*~Enter the dream~*:
Rosie from The Jetsons.
Vacuuming the house.
Chopping carrots.
Folding laundry.
Walking upright.
Talking back.
Humanoid. Familiar. Comfortable.
But here’s the real question: Is that actually the most effective design? Or is it just the most emotionally intuitive one?
Rosie vs. The Quiet Efficiency Machine
Imagine two systems doing the same job:
Option A:
A humanoid robot standing upright, gripping a knife, chopping carrots on a cutting board like a person.
Option B:
A non-humanoid automated food processing system that dices 200 carrots per minute using a high-speed rotary mechanism.
Which one scales better?
Which one costs less to maintain?
Which one moves faster?
Now apply that same comparison to:
Vacuuming
Warehouse picking
Transporting goods
Cleaning floors
Sorting packages
Humanoid robots are designed to fit into environments built for people.
Non-humanoid robots are designed to optimize the task itself.
Those are very different philosophies.
Where Human Data Comes In
Here’s the part most people miss:
Both designs depend on human data.
But they use it differently.
If You’re Building Rosie…
You need to model:
Human joint articulation
Human grip mechanics
Human reach envelopes
Human visual attention
Human gait patterns
Human object manipulation sequences
The robot must replicate human behavior within human-designed infrastructure.
That means the data pipeline focuses on:
• First-person camera footage
• Hand trajectory tracking
• Eye gaze mapping
• Full-body kinematics
• Task sequencing
You’re training a machine to behave like a person in a space designed for people.
That’s imitation-heavy.
High dimensional.
Mechanically complex.
If You’re Building the High-Throughput Machine…
You still start with human data but for a different purpose.
Instead of copying human movement, you analyze:
What the task requires
Where humans slow down
Where precision matters
Where safety margins exist
Where variability occurs
You’re not trying to replicate the human. You’re trying to outperform the task.
The data focus shifts toward:
• Object states
• Environmental variability
• Failure points
• Throughput bottlenecks
• Material handling constraints
The robot doesn’t need arms if a conveyor works better.
It doesn’t need legs if wheels are faster.
It doesn’t need to look like Rosie.
It just needs to solve the problem.
Same Human Data. Different Outcome.
This is the key insight:
The raw human-generated data may be similar:
Video of tasks being performed
Motion trajectories
Environmental context
Edge-case recovery behavior
But the design implications are radically different.
Humanoid robots interpret that data as: “How do I replicate this motion?”
Task-optimized robots interpret that data as: “How do I eliminate unnecessary motion?”
One preserves human form. The other preserves human intent.
The Strategic Question
When companies instrument human workers, through cameras, telemetry, motion capture, they’re not just collecting training data.
They’re making a design decision.
Are we building robots that integrate into human environments?
Or are we redesigning the environment around robotic efficiency?
Rosie works because the world stays the same.
The high-throughput system works because the world adapts.
Both paths are valid.
But they are not the same engineering problem.
The Future Won’t Be All Humanoid.
And It Won’t Be All Industrial.
Some environments demand humanoid flexibility.
Others demand scaled efficiency.
The common denominator?
Human-derived real-world data.
Because before you decide what a robot should look like…
You have to understand what the human is actually doing.
Not what the SOP says.
Not what leadership assumes.
Not what the demo shows.
What actually happens.
Robotics isn’t just about building machines.
It’s about deciding which parts of human behavior to preserve……and which parts to optimize away.
Rosie is charming.
But the carrot-chopping machine might win.
The companies that scale will be the ones who use human data not just to train robots……but to decide what kind of robot should exist in the first place.
Curious how others are thinking about humanoid vs. task-optimized design in real-world automation.
Are we building Rosie?
Or are we building something faster?
Did you enjoy this article?