If You Want Robots to Work in the Real World…
If You Want Robots to Work in the Real World…
You Have to Record the Real World.
Not the demo.
Not the simulation.
Not the SOP.
The actual shift.
Because here’s the uncomfortable truth:
Most automation strategies are built on how leadership thinks work happens.
Not how it actually happens at 2:17 PM on a Tuesday when something breaks.
If we’re serious about robotics that scale, we need to talk about what real-world data collection really looks like.
And it’s not glamorous.
It Starts on the Floor
Real-world data collection doesn’t begin in a lab.
It begins with someone:
Driving a forklift
Moving inventory
Restocking a shelf
Performing equipment checks
Loading a truck
Cleaning a machine
Walking a facility
And doing it exactly the way they normally would.
No staging.
No scripting.
No artificial constraints.
Just work.
What Gets Captured?
When machines or individuals are equipped with cameras and sensors, fixed or wearable, several layers of signal emerge:
1️⃣ Environmental Reality
Lighting variability
Obstructions
Wear and tear
Clutter accumulation
Human traffic patterns
This is what perception models actually need.
2️⃣ Micro-Decisions
Hesitations before turning
Re-approaches to misaligned loads
Extra clearance around pedestrians
Manual corrections
“Double checks” before execution
These are not documented anywhere.
But they are everywhere.
3️⃣ Task Deviations
When the SOP doesn’t fit
When shortcuts are taken
When safety margins expand
When workflow changes mid-task
This is where automation systems usually fail.
Because this is where reality diverges from documentation.
Yes <> This Includes Menial Tasks
There’s a misconception that only complex technical workflows are worth recording.
That’s backwards.
Some of the most valuable data comes from repetitive, “simple” tasks:
Picking items
Stacking materials
Walking inspection routes
Scanning inventory
Opening and closing access points
Repetition exposes variability.
And variability is what breaks robotic systems.
When you record hundreds of real executions of the same “simple” task, patterns emerge:
• Common friction points
• Frequent adjustments
• Subtle safety behaviors
• Environmental drift over time
This is the foundation of robust autonomy.
Wearable Cameras Change the Equation
Mounted cameras on equipment capture environment and motion.
Wearable cameras capture attention.
Where does the operator look before acting?
What do they visually confirm?
What do they ignore?
What triggers a pause?
That perspective is gold for robotics training.
It helps answer questions like:
What visual cues matter most?
What signals are noise?
When does a situation feel “off”?
These insights rarely show up in logs or telemetry.
But they show up clearly in first-person footage.
What This Looks Like Operationally
Real-world data collection at scale is surprisingly straightforward:
Instrument equipment and/or operators
Capture synchronized multi-modal data
Annotate friction points and edge cases
Feed structured datasets into perception and planning models
Repeat continuously
The key word is continuously.
Because environments evolve.
Layouts shift.
Volume spikes.
Equipment ages.
Humans adapt.
Your data pipeline has to evolve with it.
This Isn’t Surveillance. It’s System Training.
There’s an important distinction here.
The goal isn’t monitoring workers.
It’s modeling workflows.
When done properly:
Data is anonymized
Focus is on task and environment
Insights improve safety and reduce friction
Human expertise is encoded into systems
The outcome isn’t displacement.
It’s better tools.
The Companies That Win Will Be the Most Curious
Curious about:
What actually happens on the floor
Where theory diverges from practice
How humans compensate for weak systems
What small behaviors prevent big incidents
You cannot improve what you do not observe.
And you cannot observe from a conference room.
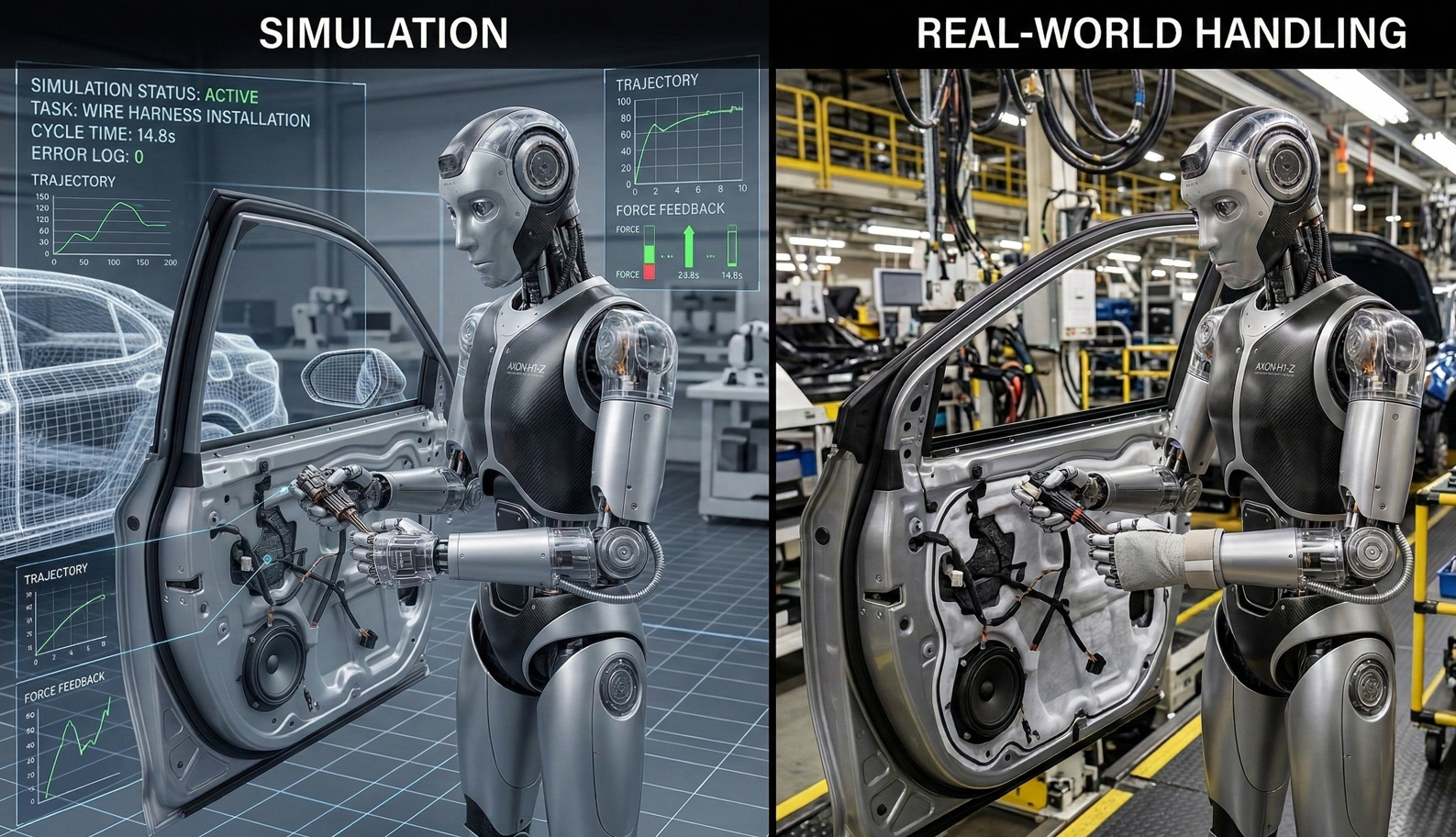
The next generation of robotics will not be built purely in simulation. It cannot be.
It will be built on thousands of hours of real-world footage.
Technical tasks.
Menial tasks.
Everything in between.
Because the gap between automation that works in theory and automation that works in production…
…is the data collected from people doing real work.
The “meat layer” isn’t temporary. It’s the training ground.
And the more honestly we capture it, the better our robots become.
If you’re thinking about building real-world data pipelines for robotics, AI ops, or automation, we would love to connect.
Did you enjoy this article?